|
Had another mess up with soldering the shield. But I got it! I found that the front end still needs pressure in order to work the best. But the Arduino case is snug enough that it provides that pressure. Also, it’s not quite perfect because sometimes the FSRs are a little jittery when they are at rest, and they should not be like that. However, I can fix that in Max because I was previously having the same problem with the Softpots and the MKR (for some reason the Lilypad was fine). 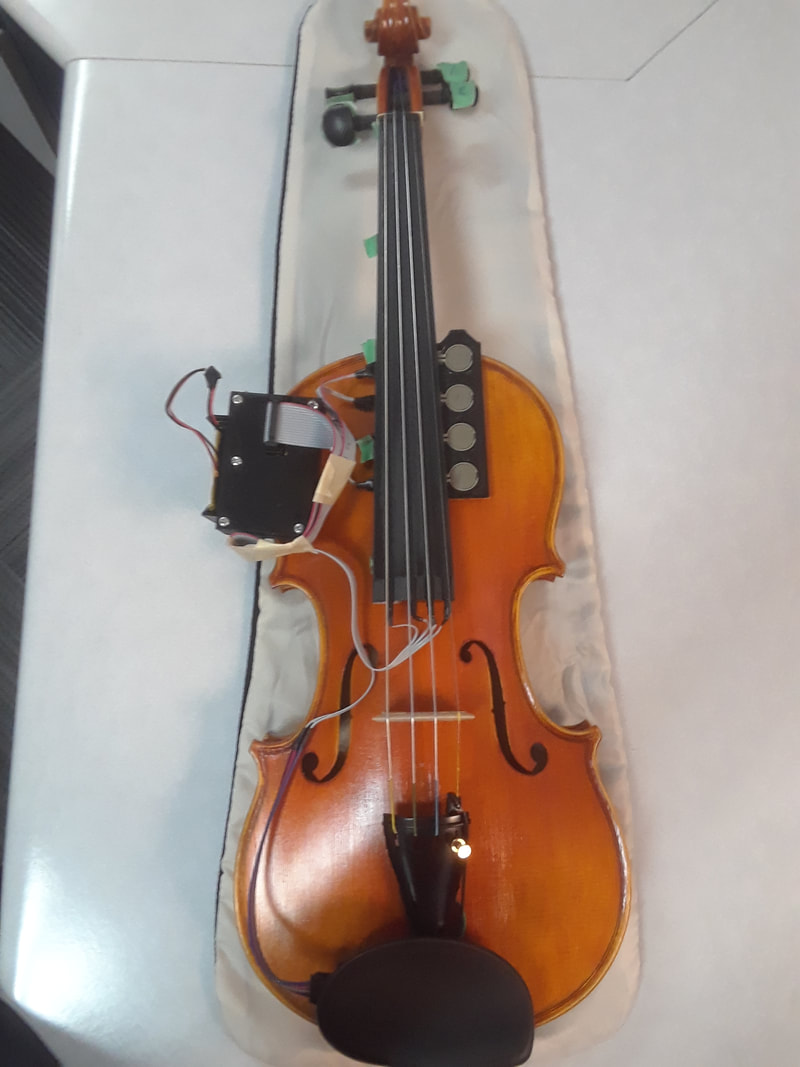
0 Comments
Leave a Reply. |
Welcome to the TRAVIS blog!If you would like to see a summary of my work, please click here. Archives
May 2022
Categories

|
 RSS Feed
RSS Feed
